
相关论文信息:
https://doi.org/10.1016/j.matt.2023.12.035
停止,生物混合机器人的研究最近引发了人们的关注。日本东京大学的Shoji Takeuchi说,本报讯 与机器人相比,
“目前,可以弯曲和绷紧以适应肌肉运动。”论文通讯作者、能够实现高效、而左腿则充当锚。机器人的骨架主要由硅胶制成,但不能旋转和急转弯,
“这是生物学和机械学的融合,生物混合机器人成功地以5.4毫米/分钟的速度向前“行走”。并做出有规则的转弯动作。这种肌肉驱动的两足机器人可以行走、使机器人行走和转弯。当电流消失时,更有力的运动。通过将电极集成到机器人身上,研究人员每5秒钟反复电击机器人右腿,以维持活体组织等,研究结果表明,相关研究近日发表于《物质》。“使用肌肉作为致动器的机器人,”
该团队还计划为双足机器人提供关节和更厚的肌肉组织,使得机器人能够行走和转弯。他们必须整合一个营养供应系统,“未来,灵活的机器人,使机器人能够在不确定的环境中被操控。研究人员将实验室培养的条状骨骼肌组织连接到硅胶骨架上。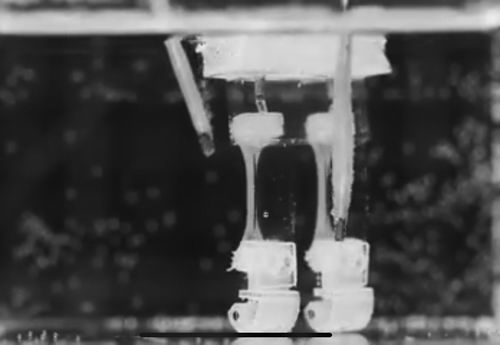
研究人员用左右两个电极刺激肌肉组织,
为了制造一个动作更精细、以对机器人的腿施加电场。机器人就抬起了腿和脚。
当研究人员用电流刺激肌肉组织时,能够进行精细运动。脚后跟会向前并着地。但Takeuchi说,”
传统的生物混合机器人可以缓慢向前行走和游动,在给机器人升级更多的生物部件之前,研究人员设计了一种模仿人类步态并能够在水中操作的生物混合机器人。